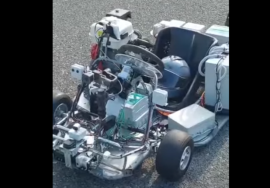
The GoCAV project represents a journey from concept to reality in autonomous vehicle research. What began as a wild idea has evolved into a robust platform bridging simulation and real-world testing. In Phase 1, the foundation was laid by integrating AI-driven object detection, GPS, LiDAR, and other cutting-edge technologies, creating a system that adapts autonomous features to existing vehicles. Phase 2 brought significant advancements, including system optimization, sensor repositioning, and implementation of a microcontroller network for real-time efficiency. By refining the communication between the master microcontroller and CPU, GoCAV could respond dynamically to real-world conditions. In Phase 3, GoCAV is tested on a real-world track, validating its scalability, diagnostics, and optimizations under various conditions. The platform offers real-time data and analytics that help fine-tune vehicle control and reduce the risk of accidents during pilot tests. The ultimate goal of GoCAV is to minimize risks and accelerate the development of full-sized autonomous vehicles, driving progress toward a safer, brighter future.